Our drive technology for construction vehicles has reached the
next level thanks to the new heavy-duty planetary hub
reduction axle! A shorter gear ratio means that the
remote-controlled trucks can be steered even more precisely
through extremely difficult terrain. We will be showcasing our
planetary hub reduction axle at the Faszination Modellbau
trade fair in Friedrichshafen.
Shorter gear ratio for greater drive power
Our remote-controlled trucks can show what they really are
made of on off-road excursions. A powerful motor, precise
control and stable components are required to master any
obstacle without causing damage. To make navigating through
uneven terrain even easier in the future, we have developed an
axle for our off-road construction vehicles that raises the
driving experience to a whole new level: the heavy-duty
planetary hub reduction axle!
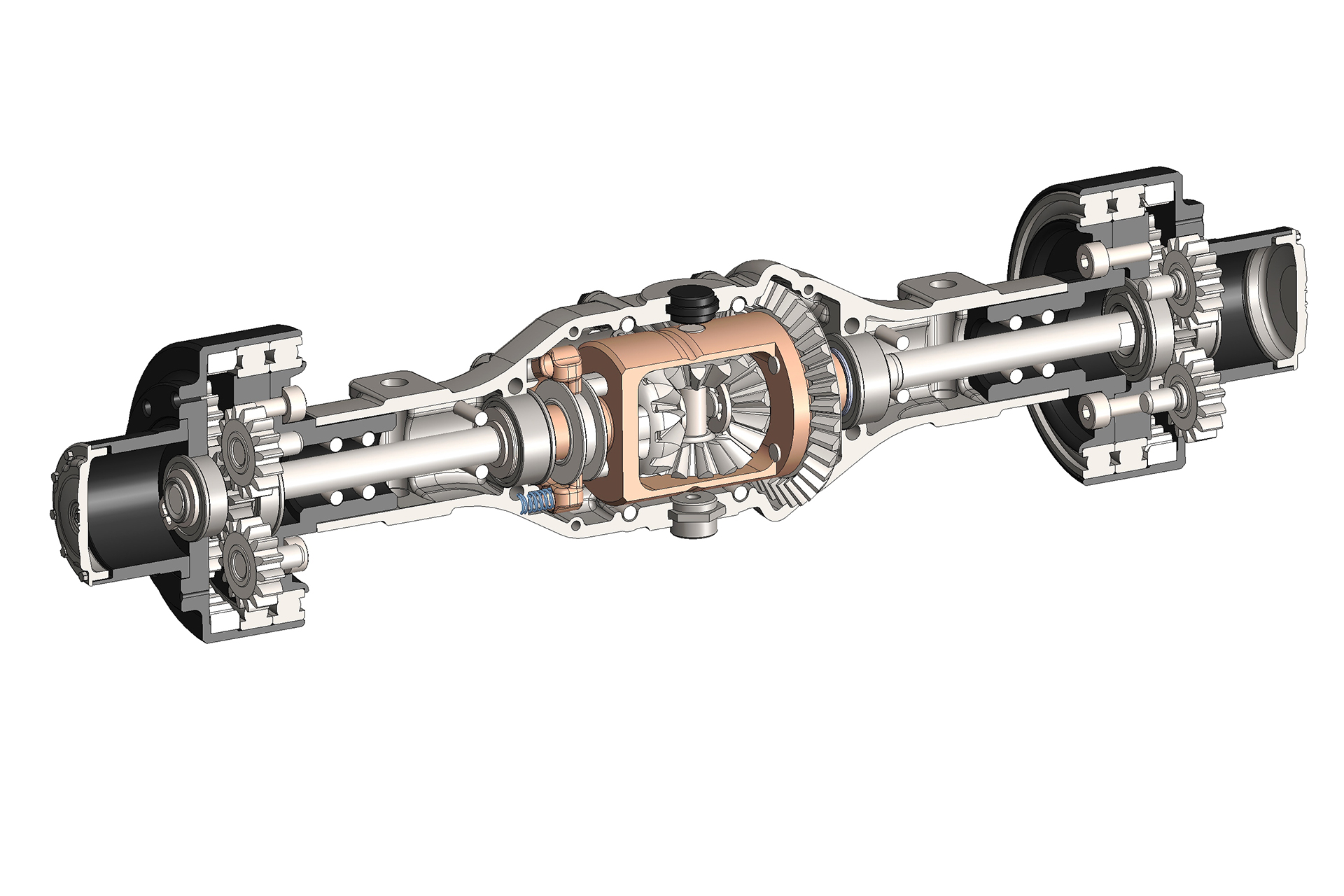
The name says it all with the planetary hub reduction axle –
it meets even the most extreme terrain requirements. The total
gear ratio of the axle is 1:5. This shorter gear ratio means
that the models can be steered more sensitively when
maneuvering in difficult terrain. Likewise, with the same
engine power, approx. 65 percent more drive power is applied
to the wheels, relieving the entire drive train at the same
time. The extremely high torque is only generated in the
planetary hub gear of the axles. Here the ratio is about 1:3,
so that the load on the differential and lock is only
one-third as high.
The Heavy-Duty Planetary Hub Reduction Axle at a Glance
-
All gears, lock and universal joints are made of hardened
steel.
-
The robust housing is made of stainless steel and has a very
small diameter of only 28 mm to allow greater ground
clearance and thus improved off-road mobility.
-
The axles are equipped with extra-large ball bearings in the
wheel hubs, which guarantees high loads.
-
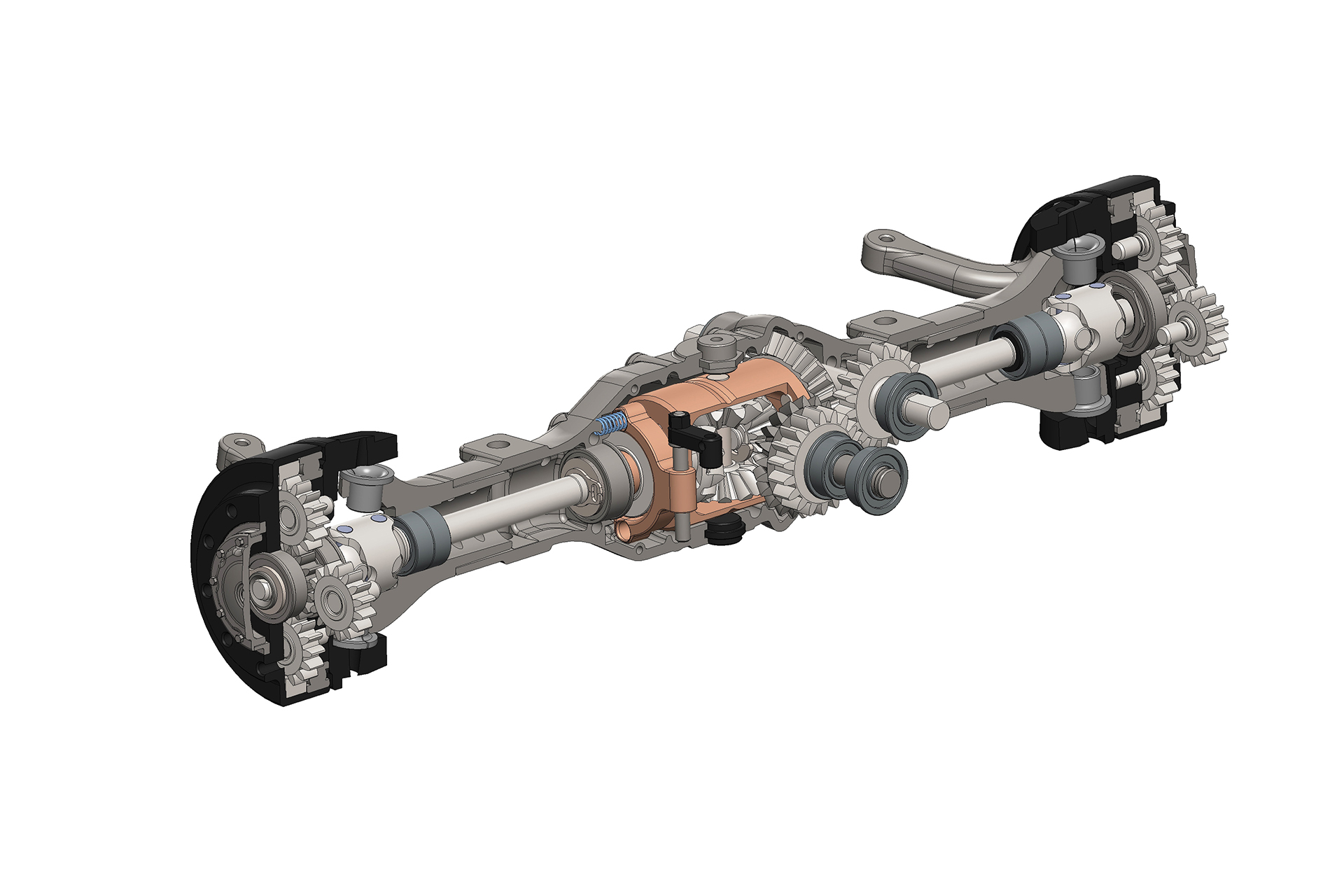
The axle drive is in the same direction without reversing
the direction of rotation of the cardan shafts.
-
The kingpins in the front axle are mounted at an angle to
improve the steering geometry. This results in lower
actuating forces for the steering servo and a smaller
turning circle.